Q: What does "multimodal distribution" mean in computer vision literature (eg. image-to-image translation)?
While reading papers on conditional image generation using generative modeling (eg. "Toward Multimodal Image-to-Image Translation" by Zhu et al (NIPS 2017)), I wasn't clear what was meant by "one-to-many mapping" between input image domain and output image domain, "multimodal distribution" in the output image domain, or "multi-modal outputs" (eg. Quora).
Definition
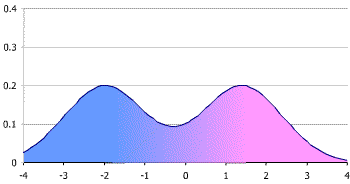
In statistics, a multimodal distribution is a continuous probability distribution with two or more modes (distinct peaks; local maxima) - wikipedia
(single-variable) bimodal distribution
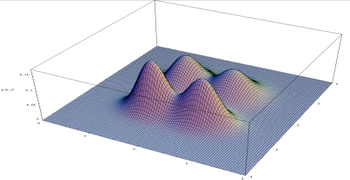
bivariate multimodal distribution
In high-dimensional space (such as an Image domain: \(P(X)\) where X lives in \(d\)-dim space where \(d\) is the number of pixels, eg. \(32x32=1024\). If each pixel \(X_i\) takes a binary value (0 or 1), the size of this image domain is \(2^{1024}\). If each pixel takes an integer value \(\in [0,255]\), then the size of this image domain is \(256^{1024}\). This, by the way, is too big to compute for Mac's spotlight:
What it means by saying "the distribution of (output) image is multimodal" is to say, there are multiple images (ie. realization of the random variable (vector) X) with the (local) maxima value of the probability. In Figure below, the green dots represent the local maxima, ie. modes of the distribution. The configurations (ie. specific values/realizations) that achieves the (local) maximum probability density are the "probable/likely" images.
The green dots representing modes of the distribution over the image domain (which is abstracted into a 2Dim space for visualization, in this case)
So, given one input image, if the distribution of the output image random variable is multi-modal, the standard problem of
Find \(x\) s.t. \(\underset{x \in \mathcal{X}}{\arg\max} P(X)\) (\(\mathcal{X}\) is the image space)
has multiple solutions. According to the paper (Toward Multimodal Image-to-Image Translation), many previous works have produced a "single" output image as "the" argmax of the output image distribution. But this is not accurate if the output image distribution is multi-modal. We would like to see/generate as many of those argmax configurations/output images. One way to do so, is by sampling from the output image distribution. This is the paper's approach.
Multimodal distribution as the distribution over the space of target domains [Domain adaption/transfer leraning]
So far, I viewed the multimodal distribution as a distribution over a specific domain (eg. Image domain), and the random variable corresponded to a realization, eg. an observed/sampled/output image instance. However,
Often confusing categorization of a mathematical model:
- SE
- NB: in CS, people often use "deterministic" to mean non-randomized. This causes confusion:
> "Determinism" means non-randomized. But, "Non-determinism" does not mean "randomized".
- Determinism vs. Non-Determinism
- ...? vs. stochastic/random
- a stochastic (or random) process means,
make html: generates output html files from files in content folder using
development config file
make regenerate: do make html with "listening" to new changes
vs. make publish: similar to make html except it uses settings in pulishconf.py
make serve: (re)starts a http server in the output folder. Default port is 8000
Go to localhost:<PORT> to see the output website
ghp-import -b <local-gh-branch> <outputdir>: imports content in
Workflow
Key points:
Do every work in dev branch.
Do not touch blog-build or master.
blog-build will be indirectly modified by ghp-import (or make publish-to-github)
and master is the branch that Github will access to show my website.
So, manage the source (and outputs) only in dev branch.
Local dev
Activate the right conda env with pelican library
condaactivatemy-blogcd~/Workspace/Blog
Make sure you are on dev branch
git checkout dev
(this step is for github syncing) Add new files under content
git add my-article.md
Generate the content with pelican
make html # or, make regenerate
Start a local server
make server
Open a browser and go to localhost:8000
Or whatever the port number is, set in Makefile (under the variable name of PORT)
Global dev
Use make publish instead of make html
Update the blog-build branch with contents in output folder
Push the blog-build branch's content to origin/master
These three steps can be done in one line:
makepublish-to-github
Version control the source
Important: Write new contents only on the dev branch
gitadd<files># make sure not to push the output folder
gitcm"<commit message>"
gitpushorigindev#origin/dev is the remote branch that keeps track of blog sources
While making a visualization for my part whereabouts for the front page of this blog, I came across this easy-to-use visualization examples using amcharts. Initially, I wanted to use Google Earth Studio but it required me to import country boundaries (in KML files) as well as time to learn new toolsuites, so I find this javascript based demos more useful for my need.
Remote repositories: versions of your project that are hosted on the internet
git remote -v
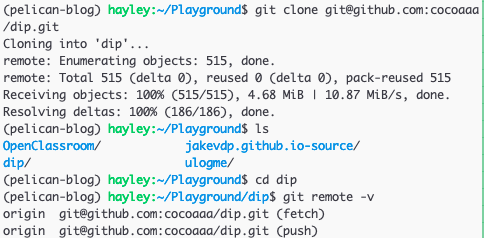
Let's say I cloned a repository from some repository, for instance
git@github.com:cocoaaa/dip.git, by running:
gitclonegit@github.com:cocoaaa/dip.git
Then, in this cloned repo's directory in my local machine,
git remote will list the shortnames of each remote handle I've specified.
By default, Git gives to the server I've just cloned the shortname, origin.
Use git remote -v to see both the shortname and the URLs that Git has stored for
each shortname to use for reading and writing to that remote.
git remote add <shortname> <URL>
adds a remote in <URL> with the shortname of <shortname>
git fetch <remote>
The command goes out to that remote project and pulls down all the data from that
remote project that I don't have yet. It does so for all branches in the remote.
Upon the command execution, I should have references to all the branches from that
remote, and I can merge in or inspect them at any time.
Remember that git fetch command only downloads the data to my local repository,
and does NOT automatically merge it with any of my work or modify what I'm currently
working on. So, it is safer than git pull, yet I'm required to merge it into my
work whenever I'm ready.
For fetching and pushing, my current branch needs be set up to track a remote
branch. In other words, setting up the URL to the remote repository is not enough,
and we need to specify which local branch will track which remote branch.
git clone <some-repo-url> automatically sets up my local master branch to
track the remote default branch (often also master) on the server I cloned from,
ie. <URL>.
Push my (local) changes to the remote server (upstream)
git push <remote> <branch> pushes my local branch to my remote server.
For example, if I want to push my master branch to my origin server (recall
that these names are set up by git clone <some-repo-url> command automatically),
run: git push origin master. Again, origin is the shortname assigned to the
remote server URL, and master is the name of the local branch I'm pushing.
If I want to push my local dev-local branch to my remote repository called origin's
dev-remote branch, I'd run git push origin dev-local:dev-remote.
The colon syntax follows src_refspec:dst_refspec where src_refspec and dst_refspec
are the refspecs of the source branch (in local) and the destination branch (in remote)
of the git push action, respectively.
Q: wait, we don't need to specify which branch in the remote server to push
the local branch?
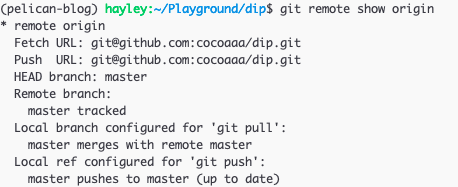
Inspecting a remote
git remote show <remote-shortname> command shows the details of the particular
remote.